下肢装具には継手の種類が多くあります.
それぞれ特徴があり,色々な機能があるのですが.
どの継手を選択するかは,新人さんのみならず.
経験豊富な方でも,装具の機能そのものを決めると言っても良いので
熟考を必要とする要素ではないかと思います.
装具の足関節制御
おそらく学校の授業でも,多く触れた内容ではないかと思いますが.
名称や機能だけを短い時間で叩き込まれるとイマイチ理解が難しいですし
何のためのものなのか分からず,装具にも興味持てない事があるかもしれません
そんな足継手ですが,行っている制御の種類自体はとてもシンプルです.
- 遊動
- 固定
- 制限
- 制動
- 補助
実質この5つしかありません.
これらの組み合わせによって必要な時に必要な制御をする事で
体重を支持したり,変形の予防や矯正をしたり,失われた機能を代償しています
今回はこの装具の特徴を決める基本中の基本と言ってもよい.
足継手の制御について解説していきます.
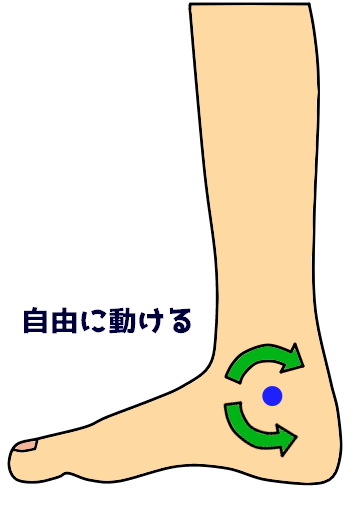
遊動
まず1つ目は遊動です.
装具は何もしていない状態で
自由に動く事ができる制御です.
この遊動には2つの考え方があり
1つは治療・更生用装具共に,
身体機能的に問題がない,
もしくは機能を習得したので
装具は何もする必要がない場合.
もう1つは,主に治療装具で重要となりますが.
機能の獲得のために特にフォーカスして学習を行いたい場合です.
脳卒中などの下肢装具で,この遊動区間にどうアプローチするかが重要です.
装具がなにもしない=自身でコントロールする必要がある なので
自由度の制約を併用して難易度を調整しつつ,
いま獲得したい,フォーカスした運動学習を遊動に設定して行っていきます.
装具の遊動が,この2つのどちらに属しているのかは
制御の良し悪しを判断する際にとても重要です.
前者で問題がある場合は,その動作の獲得が出来ていないという事ですし
後者で問題がある場合には,課題の難易度を調整する必要があるかもしれません
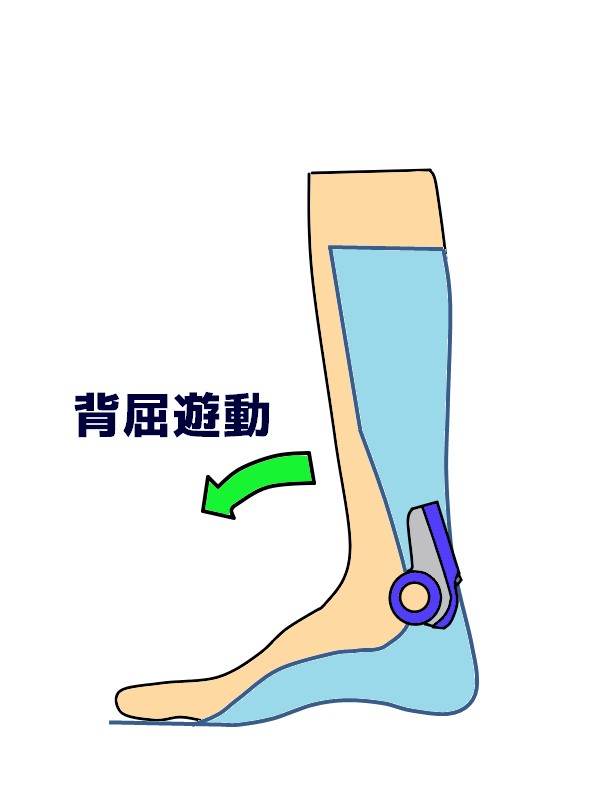
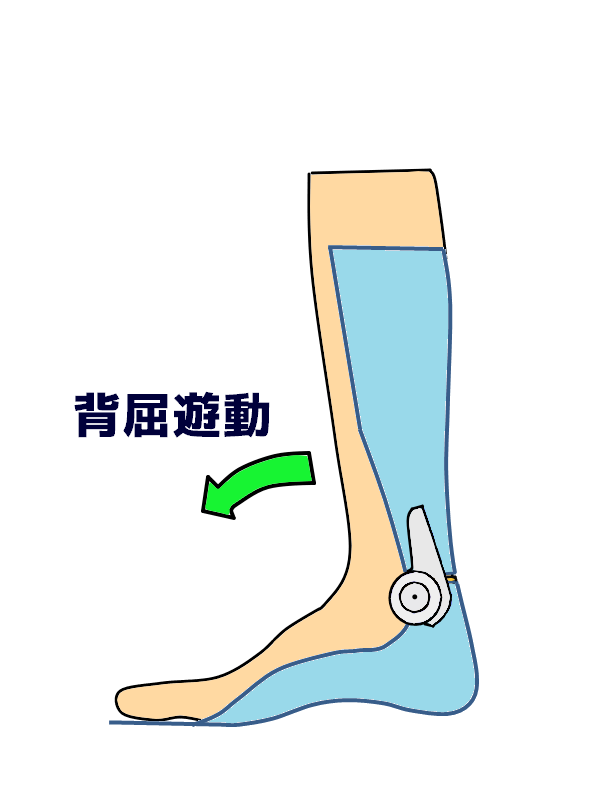
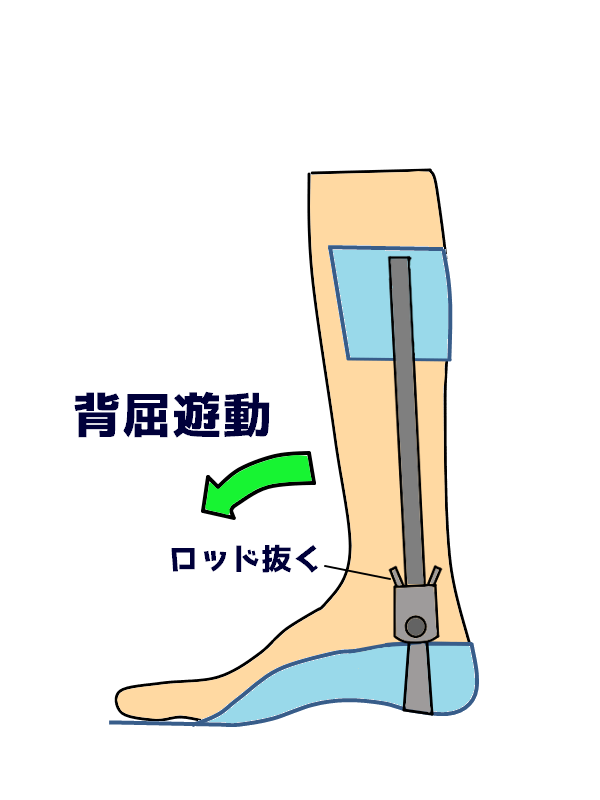
足継手における遊動は,主に背屈で用いられることが多いですね.
GS継手や,タマラック,オクラホマ継手などがその代表で
Wクレンザック継手もロッドを外すことで遊動にする事が可能です.
固定
続いて固定です.
固定は遊動の逆でその名の通り
底背屈が全く動かない状態です.
固定を行う目的は安静と安定です.
自由度を0に制約する事で
足関節制御は装具に任せ
その他の関節動作の学習を
集中して行うというのが
1つの使用方法でしょうか.

当然足関節が動かないことによる弊害があるので,
普通に歩こうとすると代償が起こります.
ハンドリングなどで改善可能な代償か.装具や靴に工夫が必要か.
そもそも遊動にするとコントロールが難しい,など
様々な要素を加味して使用する必要があります.
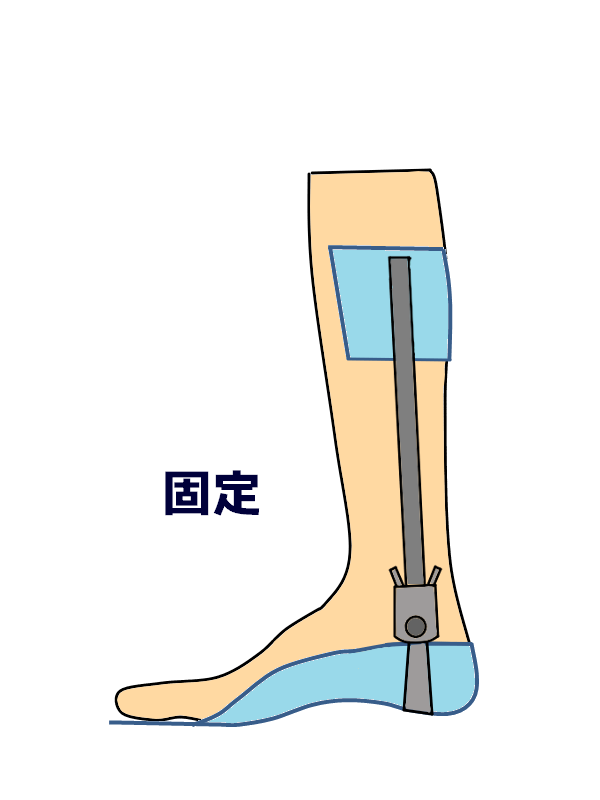
また固定されている事から,装具の「初期角度」も非常に重要です.
代表的なものは,Wクレンザック継手を固定状態で使用したり
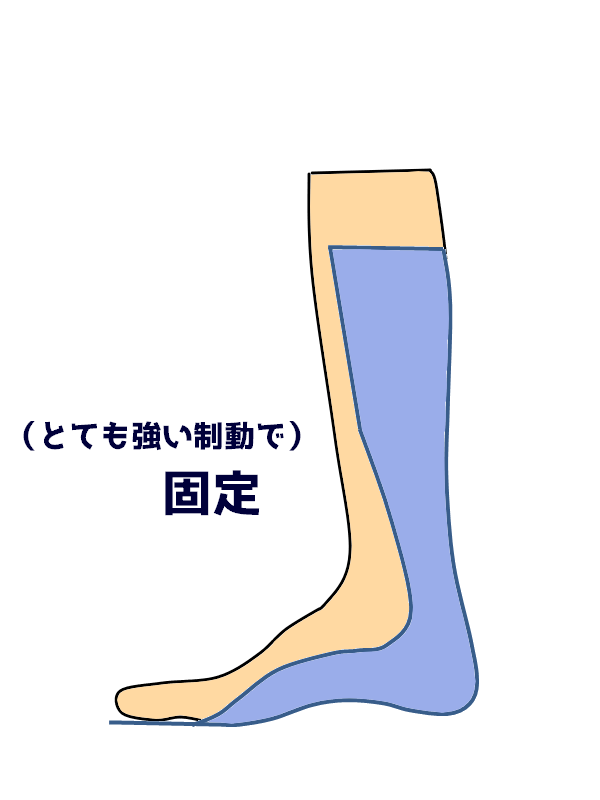
SHBのプラスチックを厚く,トリミングを浅くすることで
制動を最大にして動かないようにしたリジットSHB(固定)
として使用するものが挙げられます.
制限
3つ目は制限です.
遊動と固定の2つの側面を,角度によって使い分ける制御といえるでしょうか.

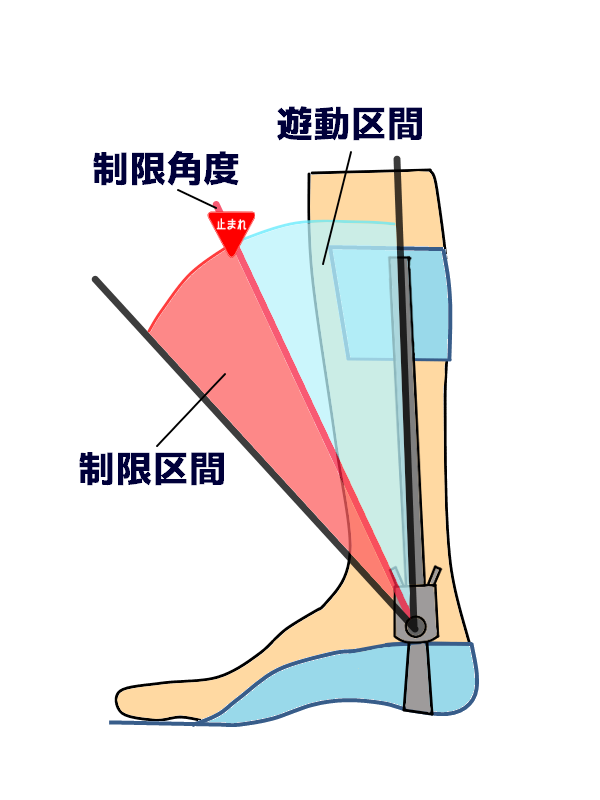
治療装具としての運用を考えると
遊動にして動作の学習をしたい.しかし遊動では難易度が高すぎて練習困難
といった場合に,一部の角度制限をして難易度を調整することが出来ます.
更生用装具でも同様に,分かりやすい例を挙げると
ある程度の関節コントロールが可能だがこれ以上の背屈角度では膝折れしやすい
といった場合に,背屈を制限して膝折れを防ぐことが出来ます.
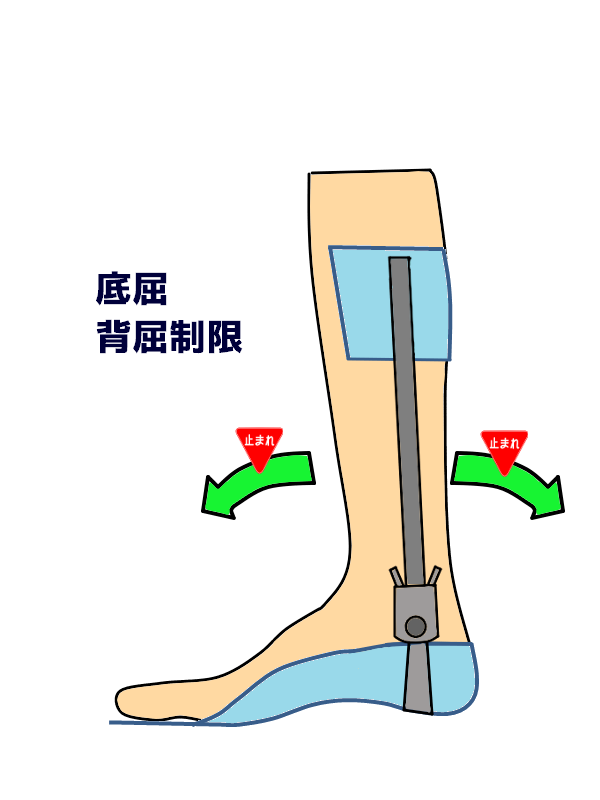
代表的なものは,Wクレンザック継手の底背屈制限や
タマラック,オクラホマ継手の底屈制限ですね.

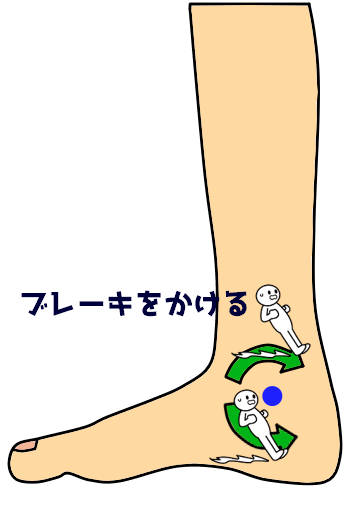
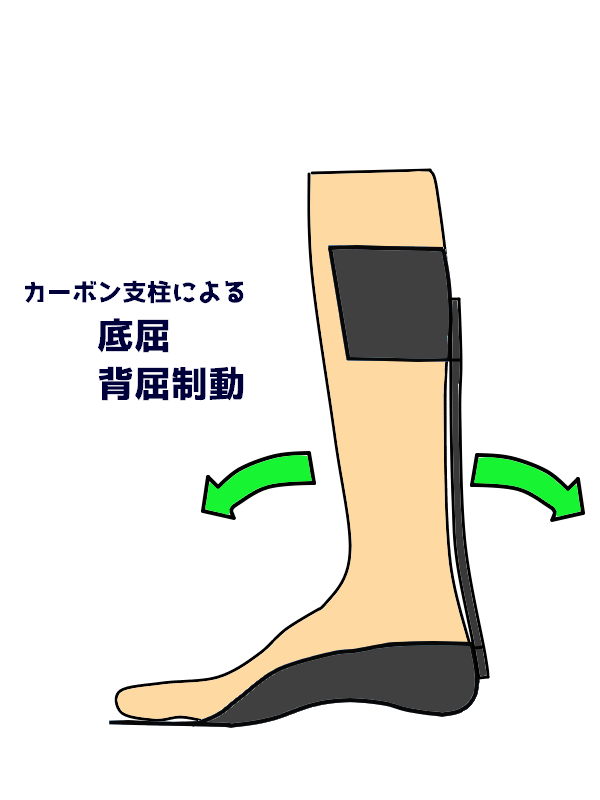
制動
4つ目は制動です.
簡単に言うとブレーキをかける事です
制動の扱いが難しいのは
その強さによって与える影響が
ガラッと変わることでしょうか.
固定の項での触れたとおり
非常に強い制動は,ほぼ固定と同義で
全く動かないくらいのブレーキを
かける事も出来ますし.
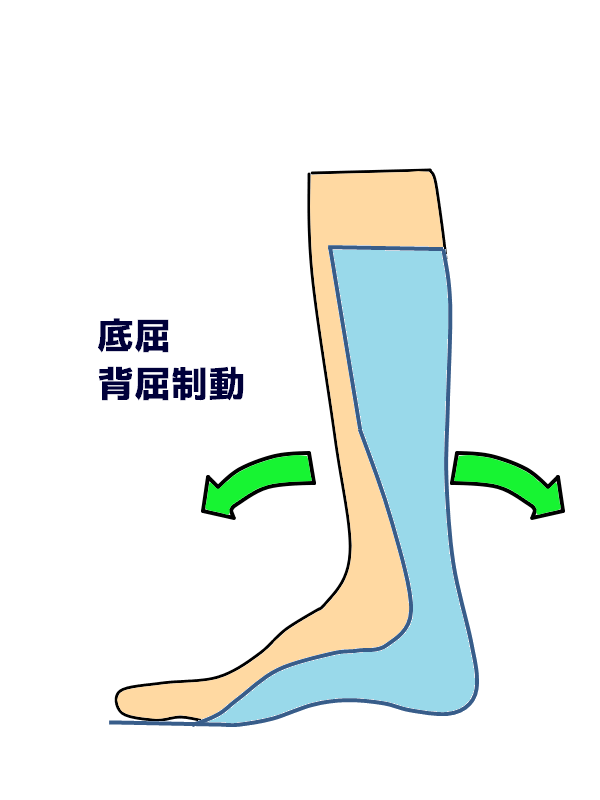
少し弱めの制動であれば,徐々にブレーキをかけつつ
最終的に止まるといった調整も出来ます.
その特徴から,筋の遠心性収縮のような働きを代償することも出来ます.
また,制動力を出すために多く利用されるものに
- プラスチックの撓み
- カーボンの撓み
- ゴムが縮む撓み
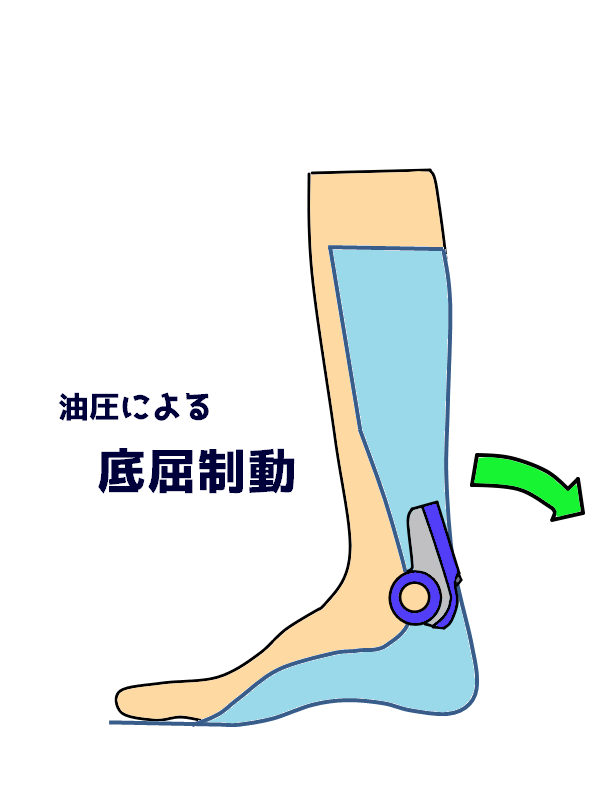
- 油圧
などが挙げられると思いますが.それぞれが出す制動力の特色も重要です.
特に油圧は速度がある大きな力に対して,大きな制動力を出す事ができるため
立脚期IC~LRでのヒールロッカーの制御などで真価を発揮します.
代表的なものは,SHBのプラスチックの撓み.RAPSなどカーボン支柱の撓み
GS継手の油圧シリンダーによる底屈制動が挙げられます.
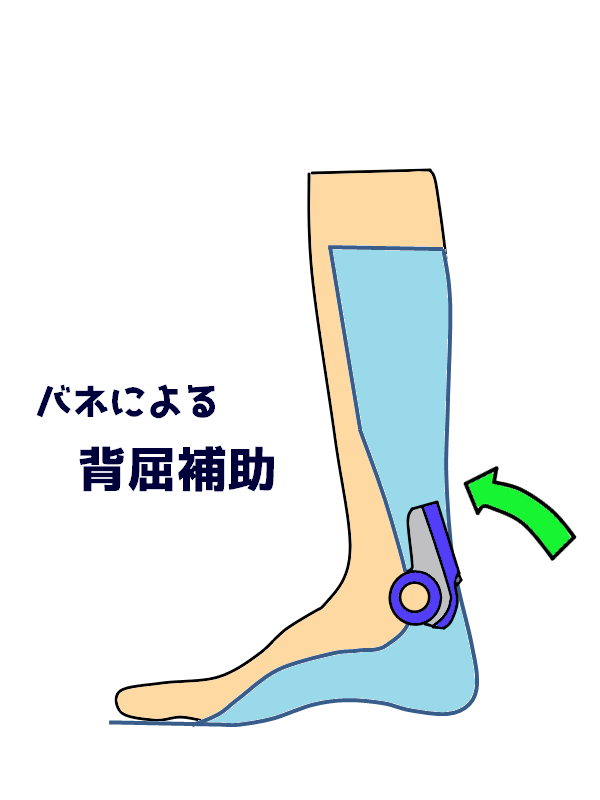
補助
最後の5つ目は補助です.
補助そのものを目的とする事も
あるのですが.
多くの足継手では副次的に
補助が働くという事が多いです.
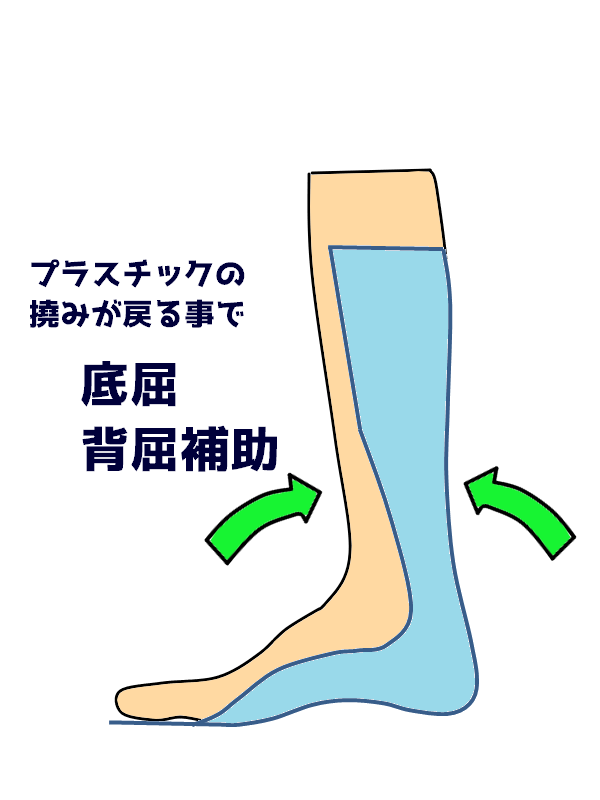
補助を行う際に現状のほとんどの装具は,動力が付いていません.
基本的にはバネやプラスチックなどの撓みが元に戻る力を利用しています.
動力が付いているロボットなどは,この補助とは少し違うので除きます.
また別の機会に解説していきますね.
SHBやRAPSが制動した時に撓みが戻る力を利用した補助
Wクレンザック継手やPDAに入っているバネや
GSが底屈した際に,縮んだバネの撓みが戻る力を利用した補助
などが代表として挙げられます.
まとめ
下肢装具足継手の基本とも言える制御の方法について解説しました.
装具の検討を行う上で,その装具がどんな機能を持っているのか知る事は
とても重要なことだと思います.
本当に大切なのは,これらの機能を使って何をするかです.
それぞれの装具の役割の違いを理解するためにも
基本的な装具の知識は押さえておきたいですね.
次回は,固定や制動の制御を行う上でとても重要な装具の設定である
製作時の「初期角度」について解説していきます.
参考文献
日本義肢装具学会 監修,装具学,医歯薬出版,第3版,p60
日本整形外科学会 ほか(監修),義肢装具のチェックポイント,医学書院,第7版,p232